
“Dream is not that which you see while sleeping it is something that does not let you sleep. Dream, Dream Dream
Dreams transform into thoughts
And thoughts result in action”
— APJ ABDUL KALAM
Publications and Presentations

HEDRA
A Bio-Inspired Modular Tensegrity Soft Robot With Polyhedral Parallel Modules
March, 2021
Preprint
Vishal Ramadoss*, Keerthi Sagar*, Mohamed Sadiq Ikbal, Jesus Hiram Lugo Calles, Matteo Zoppi
*(Equal Contribution)
PMAR Robotics Group
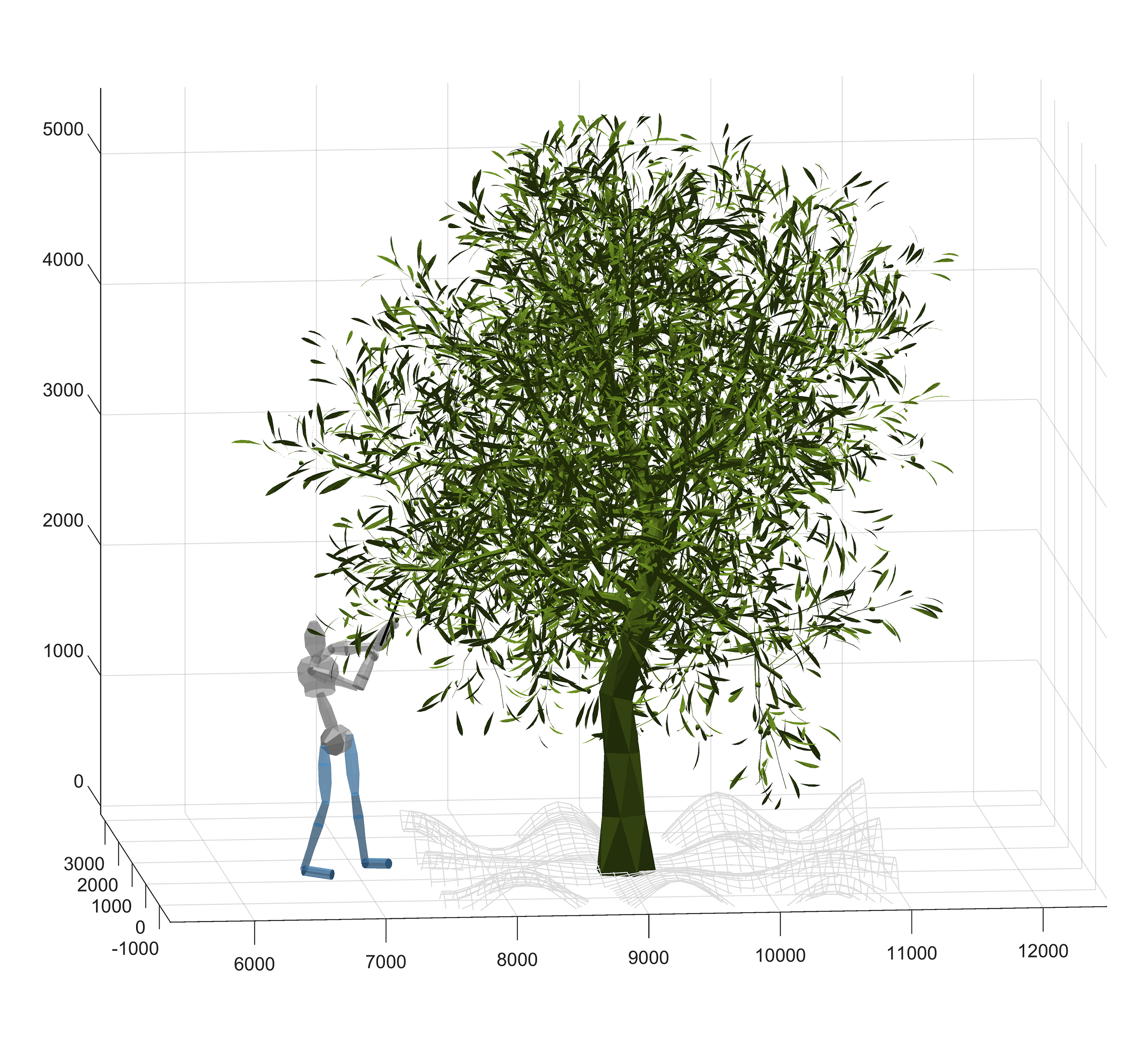
AGRICULTURE ROBOTS
Design Of Passive Exoskeletons based on Kinematic geometry approach
March, 2021
(An Italian Patent Pending)
Ongoing work
PMAR Robotics Group
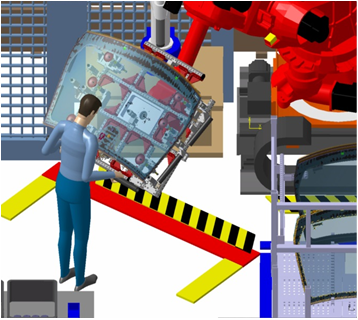
Human-Robot Collaboration
Design and Analysis Of a Reconfigurable Mechanism For Human-Robot Tactile Interaction: A Kinematic Geometry and Screw Theory Approach
March, 2021
Ongoing Journal work
Keerthi Sagar, Vishal Ramadoss, Michal Jilich, Matteo Zoppi, Dimiter Zlatanov, Alessandro Zanella
PMAR Robotics Group, Centro Ricerche Fiat
TENDON COBOTS
Modeling And Stiffness Evaluation Of Tendon Driven Robot For Collaborative Human-Robot Interaction
December, 2020
Vishal Ramadoss*, Keerthi Sagar*, Mohamed Sadiq Ikbal, Dimiter Zlatanov, Matteo Zoppi
*(Equal Contribution)
PMAR Robotics Group
VIRTUAL REALITY
Dynamic Pose Tracking Performance Evaluation of HTC Vive Virtual Reality System
February, 2021
Mohamed Sadiq Ikbal, Vishal Ramadoss, Matteo Zoppi
IEEE Access Journal
PMAR Robotics Group
STORM
Screw Theory Toolbox For Robot Manipulator and Mechanisms
October 25, 2020
IEEE International Conference on Intelligent Robots and Systems (IROS) 2020
Keerthi Sagar*, Vishal Ramadoss*, Matteo Zoppi, Dimiter Zlatanov
*(Equal Contribution)
PMAR Robotics Group
MCDR
Analysis of Planar Multilink Cable-Driven Robots Using Internal Routing Scheme
August 17, 2020
International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (ASME IDETC-CIE) 2020
Vishal Ramadoss, Darwin Lau, Matteo Zoppi, Dimiter Zlatanov
PMAR Robotics Group, Chinese University of Hong Kong Robotics
StringHaptics
Design Of Serial Link Structure-Parallel Wire System For Virtual Reality Rehabilitation and Assessment
August 15, 2020
International Conference on Robotics in Alpe-Adria-Danube Region (RAAD) 2020
Vishal Ramadoss, Mohamed Sadiq Ikbal, Dimiter Zlatanov, Matteo Zoppi
PMAR Robotics Group
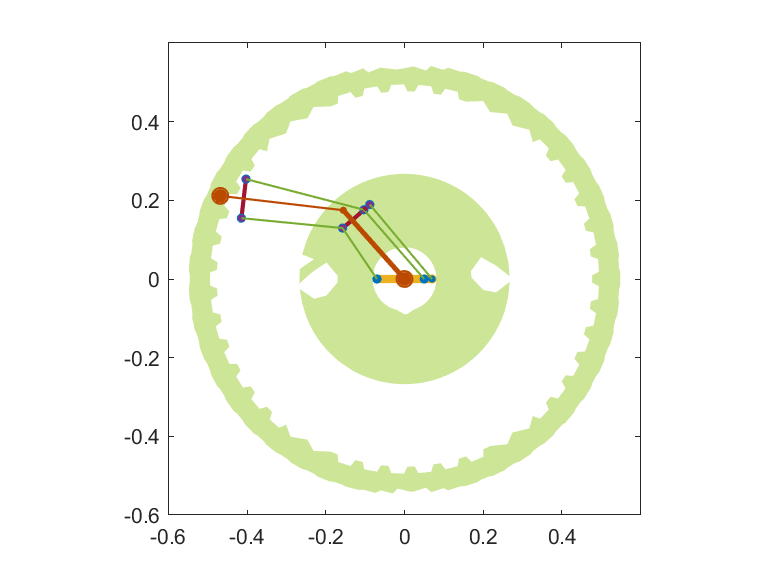
Human-Robot Collaboration
Development of a Reconfigurable Four-Bar Mechanism for a Human-Robot Collaborative Gripper
December 6, 2020
Advances in Robot Kinematics (ARK) 2020
Keerthi Sagar*, Vishal Ramadoss*, Michal Jilich, Matteo Zoppi, Dimiter Zlatanov, Alessandro Zanella
*(Equal Contribution)
PMAR Robotics Group, Centro Ricerche Fiat
Musculoskeletal Robots
Workspace Analysis of Fully Routed Two-Link Tendon Driven Manipulators
October 25, 2019
1st Conferenza Italiana di Robotica e Macchine Intelligenti (IRIM)
Vishal Ramadoss*, Keerthi Sagar*, Matteo Zoppi, Dimiter Zlatanov
*(Equal Contribution)
PMAR Robotics Group
Deploy3D
Design, Construction, and Control of Curves and Surfaces via Deployable Mechanisms
June 10, 2019
Journal Of Mechanisms and Robotics (ASME- JMR)
Vishal Ramadoss, Dimiter Zlatanov, Xilun Ding, Matteo Zoppi, Shengnan Lyu
PMAR Robotics Group, Beihang University
Assistive Robot
Modeling and Design Of An Active Assistive Exoskeletal Robot For Upper Limb Rehabilitation
February 20, 2019
9th Joint Workshop on New Technologies for Computer/Robot Assisted Surgery (CRAS 2019)
Vishal Ramadoss, Dimiter Zlatanov, Matteo Zoppi ,
PMAR Robotics Group,

Cable VSA
Modeling of a cable-based revolute joint using biphasic media variable stiffness actuation
February 20, 2019
IEEE International Conference on Robotic Computing (IRC)
Jesus H. Lugo , Vishal Ramadoss, Matteo Zoppi , Giorgio Cannata, Rezia Molfino
PMAR Robotics Group, DIBRIS Unige

Tetrad-Screw Robot
Conceptual design of tetrad-screw propelled omnidirectional all-terrain mobile robot
April 3, 2017
International Conference on Control and Robotics Engineering (ICCRE)
Jesus H. Lugo , Vishal Ramadoss, Matteo Zoppi, Rezia Molfino
PMAR Robotics Group
Deployable Mechanism
Construction and Control of Surfaces via Deployable Mechanisms With Three Degrees of Freedom
December 5, 2016
International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (ASME IDETC-CIE) 2016
Shengnan Lu, Vishal Ramadoss, Dimiter Zlatanov, Xilun Ding, Matteo Zoppi
PMAR Robotics Group, Beihang University
DrawMe
OpenSYMORO Visualization Interface
June 1, 2014
Małgorzata Kameduła, Vishal Ramadoss, Wisama Khalil, Francois Rongere
IRCCyN Nantes, France
Capsteer
Capacitive Sensing slider based steering
June 1, 2010
IEEE International Conference on Soc Design- “Soc Design for IT Convergence” (ISOCC 2010), DBpia Journal
Hemanth Kumar, Vishal Ramadoss, Poonkathirvelan, Aravind
Chennai, India
Chronsense
Capacitive Sensing non invasive vital sign monitoring
May 1, 2009
IEEE International Conference on Soc Design- (ISOCC 2009),
DBpia Journal
Vishal Ramadoss, Poonkathirvelan,
Chennai, India

Dvaitha
Animatronic Puppet
September 12, 2012
Vishal Ramadoss,
Chennai, India

Sensing Glove
Smart Textiles
January 09, 2011
Danfoss Polypower Innovation Challenge, Denmark
Vishal Ramadoss, Poonkathirvelan
Chennai, India
In recent times, capacitive tactile sensors for robot skins, sensor array for foot insoles, stretchable touch-sensing, force sensing hand for HRC is becoming popular. In 2010, we fabricated dielectric electroactive polymer based capacitive sensors for glove , tracking, pressure sensing, VR applications in the lab of IIT-M and manufactured a PCB based on the initial protoype.

Structural Health Monitoring
Wind turbine structural health monitoring using dielectric elastomers
Danfoss Polypower Innovation Challenge, Denmark
January 19, 2011
Vishal Ramadoss, Poonkathirvelan
Chennai, India
Selected curriculum work – EMARO- France,Italy
Medical Robot Perception and Detection Algorithm Using OpenCV
August 2015
IRCCyN Nantes, France
Vishal Ramadoss, Yeshasvi Tirupachuri
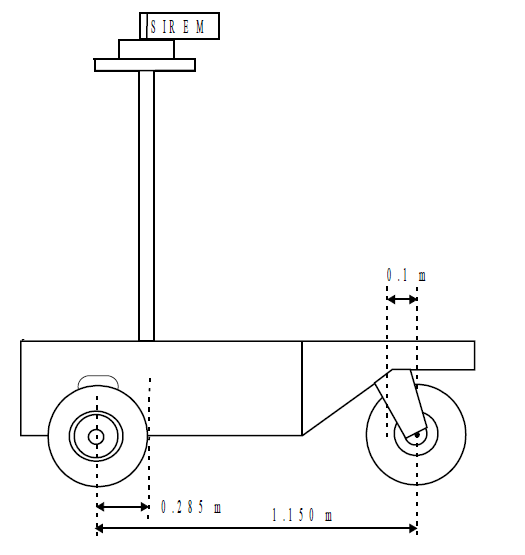
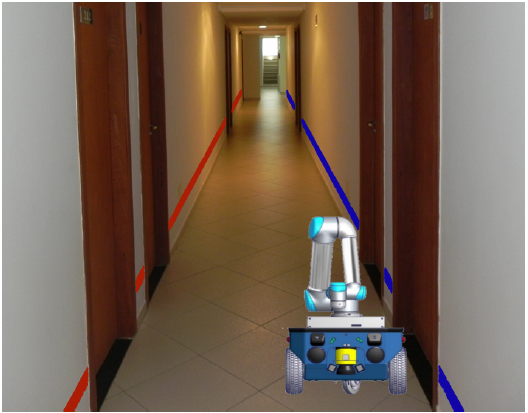
Mobile Robot Localization and Odometry
August 2015
IRCCyN Nantes, France
Vishal Ramadoss, Prashanth Ramadoss, Gaetan Garcia
Wheeled Mobile Robot Control
August 2015
IRCCyN Nantes, France
Vishal Ramadoss, Prashanth Ramadoss
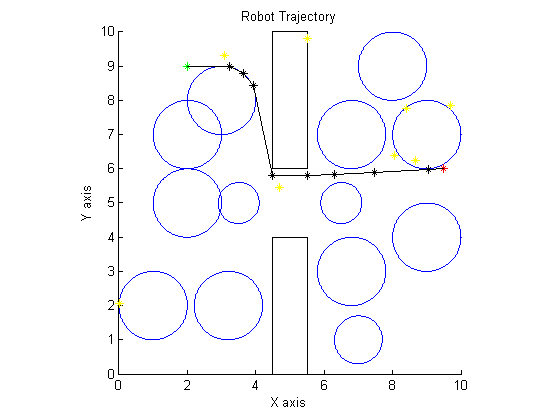
Optimization and Collision Detection
August 2015
IRCCyN Nantes, France
Vishal Ramadoss, Yeshasvi Tirupachuri
Software Architecture and Planning Problem
August 2015
IRCCyN Nantes, France
Vishal Ramadoss
Singularity of Mechanisms using Instantaneous kinematics
August 2016
PMAR ROBOTICS, Genova
Vishal Ramadoss
Learning Algorithms
August 2015
IRCCyN Nantes, France
Vishal Ramadoss
2021
- Ramadoss, V.*, Sagar, K*., Ikbal, M.S., Zlatanov, D., Zoppi, M. Modeling And Stiffness Evaluation Of Tendon Driven Robot For Collaborative Human-Robot Interaction. 2021 IEEE ISR (* Equal Contribution) PPT DOI
2020
- Ikbal, M.S., Ramadoss, V. and Zoppi, M., 2020. Dynamic Pose Tracking Performance Evaluation of HTC Vive Virtual Reality System. IEEE Access. PPT DOI
- Ramadoss, V.*, Sagar, K*., Ikbal, M.S., Calles, J.H.L., M.S., Zoppi, M. HEDRA: A Bio-Inspired Modular Tensegrity Soft Robot With Polyhedral Parallel Modules. Manuscript submitted (* Equal Contribution) PPT DOI (Preprint)
- Sagar, K*., Ramadoss, V.*, Zoppi, M., Zlatanov, D. STORM: Screw Theory Toolbox For Robot Manipulator and Mechanisms. IROS 2020. (* Equal Contribution) PPT DOI
- Ramadoss, V., Lau, D. Zlatanov, D. and Zoppi, M., 2020, August. Analysis of Planar Multilink Cable-Driven Robots Using Internal Routing Scheme. IDETC/CIE ASME 2020. PPT DOI
- Ramadoss, V., Ikbal, M.S., Zlatanov, D. and Zoppi, M., 2020, June. Design Of Serial Link Structure-Parallel Wire System For Virtual Reality Rehabilitation and Assessment. 29th International Conference on Robotics in Alpe-Adria Danube Region, Poitiers, France RAAD 2020. DOI
- Sagar, K*., Ramadoss, V.*, Jilich, M., Zoppi, M., Zlatanov, D., and Zanella, A. Development of a Reconfigurable Four-Bar Mechanism for a Human-Robot Collaborative Gripper. ARK 2020. (* Equal Contribution) DOI
2019
- Ramadoss, V., Zlatanov, D., Ding, X., Zoppi, M. and Lyu, S., 2019. Design, Construction, and Control of Curves and Surfaces via Deployable Mechanisms. Journal of Mechanisms and Robotics, 11(6). DOI
- Ramadoss, V., * Sagar. K*, Zlatanov, D. and Zoppi, M., 2019, October. Workspace Analysis of Fully Routed Two-Link Tendon Driven Manipulators 2019 1st Conferenza Italiana di Robotica e Macchine Intelligenti (IRIM). (* Equal Contribution) DOI
- Calles, J.H.L., Ramadoss, V., Zoppi, M., Cannata, G. and Molfino, R., 2019, February. Modeling of a cable-based revolute joint using biphasic media variable stiffness actuation. In 2019 Third IEEE International Conference on Robotic Computing (IRC) (pp. 618-623). IEEE. PPT DOI
2017
- Lugo, J., Ramadoss, V., Zoppi, M. and Molfino, R., 2017, August. Kinematic Modeling Of An Omnidirectional Reconfigurable Screw-Propelled Mobile Robot. In Human-centric Robotics-Proceedings Of The 20th International Conference Clawar 2017 (p. 465). World Scientific. PPT DOI
- Lugo, J.H., Ramadoss, V., Zoppi, M. and Molfino, R., 2017, April. Conceptual design of tetrad-screw propelled omnidirectional all-terrain mobile robot. In 2017 2nd International Conference on Control and Robotics Engineering (ICCRE) (pp. 13-17). IEEE. PPT DOI
2016
- Lu, S., Ramadoss, V., Zlatanov, D., Ding, X. and Zoppi, M., 2016, August. Construction and Control of Surfaces via Deployable Mechanisms With Three Degrees of Freedom. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Vol. 50152, p. V05AT07A070). American Society of Mechanical Engineers. DOI
Robotics Projects
PolyTense: Design of Tensegrity Robots
August 1, 2020: At PMAR Robotics, Genova, Italy
Team: Vishal Ramadoss Keerthi Sagar
Supervisors: Dimiter Zlatanov MatteoZoppi
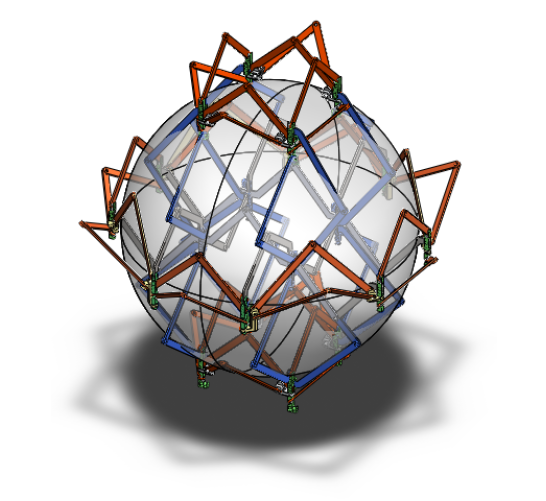
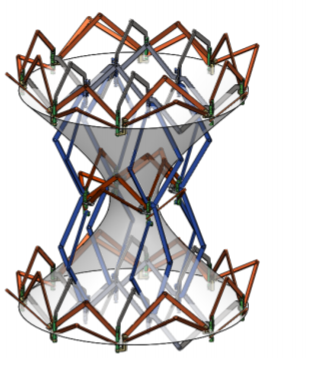
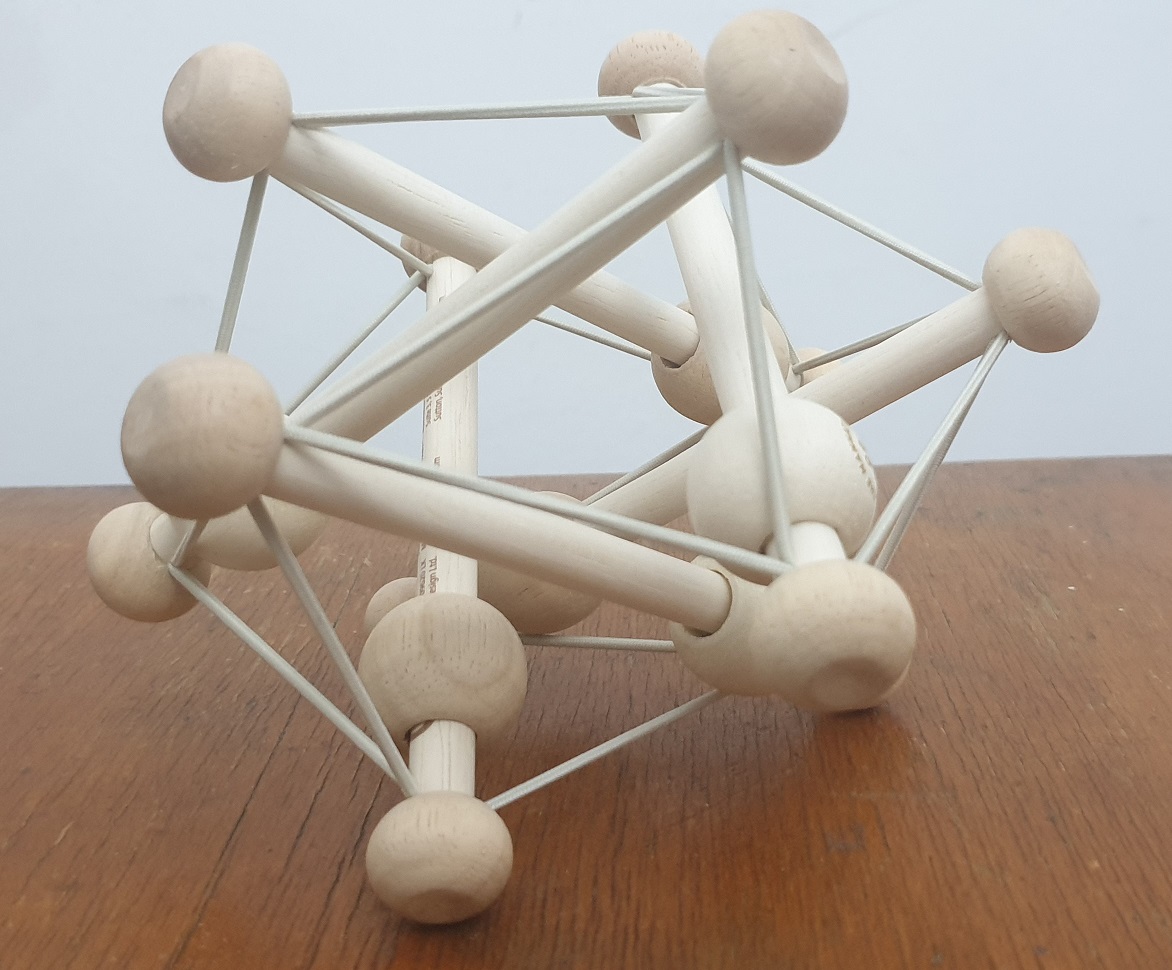
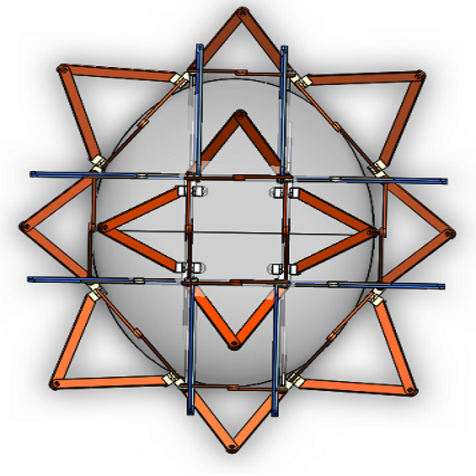
Tensegrity systems have the unique ability to be flexible in all DoFs, lightweight and independent of heavy hardware setups. Ideal tensegrity structures consist of rigid compressive elements(rods) held together in tension network(cables) such that no two rigid bodies touch each other. Robot designs using tensegrity structures are a relatively new concept. Snelson’s X-shaped tensegrity system has inspired many planar and spatial tensegrity robots. The computation of workspace for tensegrity robots are investigated. It is interesting to note that the tensegrity structure exists in musculoskeletal system of most vertebrates.
The structural elements (bones) are compressed, supported by tendons and actuated by muscles. Using compression elements suspended in a network of tension elements creates an inherently flexible structure, which most conventional robots lack. Bio-inspired tensegrity manipulators could potentially be significantly
more dexterous than a conventional rigid manipulator and carry more load than an entirely soft robot. The interlocked tetrahedron tensegrity structure is inspired by a biotensegrity model of a vertebrate spinal column and also has a striking resemblance to that of a human shoulder. We are aiming to develop a novel bioinspired tensegrity robot that can mimic human arm and leg.
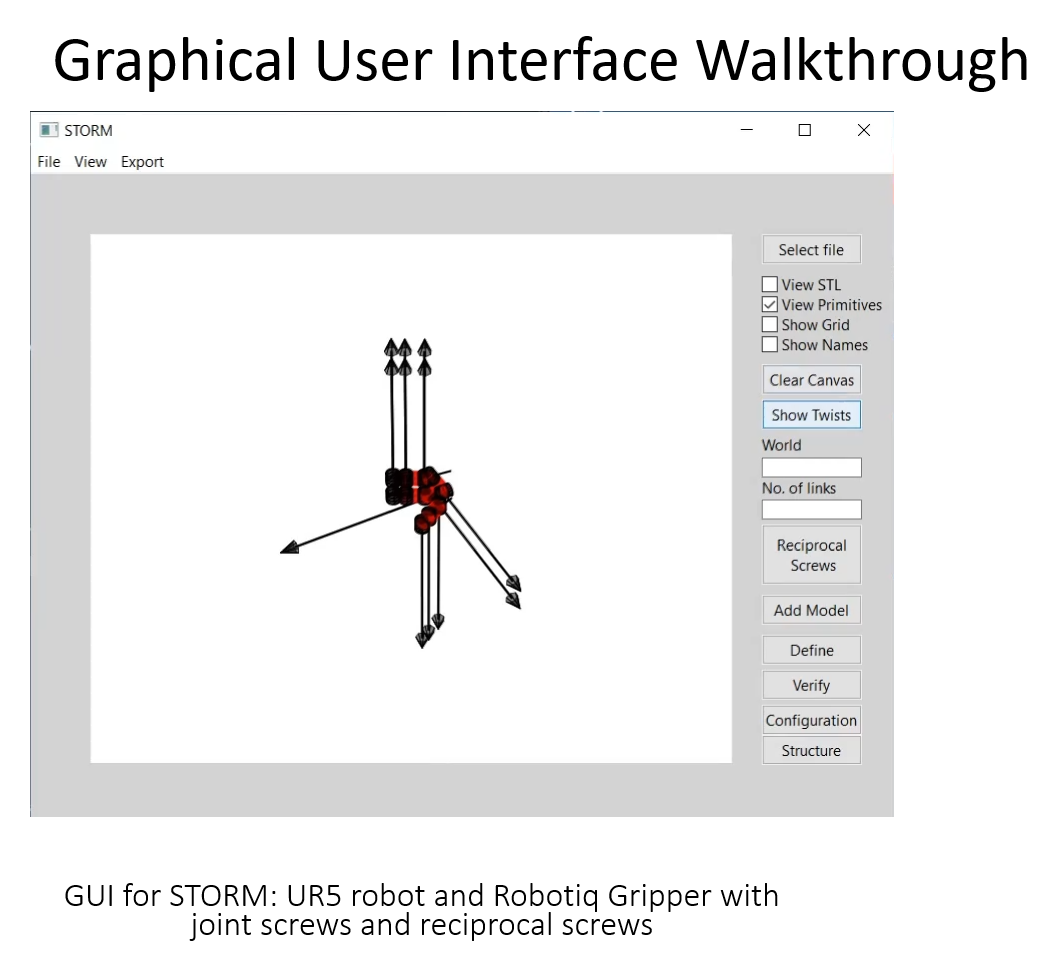
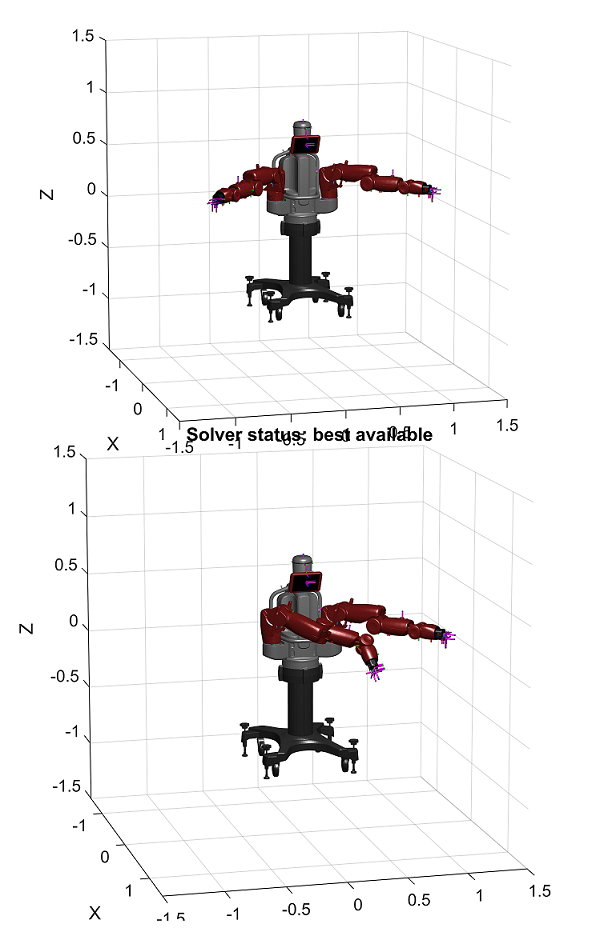
STORM: Screw Theory Toolbox For Robot Manipulator and Mechanisms
March 1, 2020: At PMAR Robotics, Genova, Italy
Team: Keerthi Sagar Vishal Ramadoss
Supervisors: Dimiter Zlatanov MatteoZoppi
Screw theory is a powerful mathematical tool
for the kinematic analysis of mechanisms and has become
a cornerstone of modern kinematics. Although screw theory
has rooted itself as a core concept, there is a lack of generic
software tools for visualization of the geometric pattern of the
screw elements. This work presents STORM, an educational
and research oriented framework for analysis and visualization
of reciprocal screw systems for a class of robot manipulator
and mechanisms. This platform has been developed as a way
to bridge the gap between theory and practice of application
of screw theory in the constraint and motion analysis for
robot mechanisms. STORM utilizes an abstracted software
architecture that enables the user to study different structures
of robot manipulators. The example case studies demonstrate
the potential to perform analysis on mechanisms, visualize the
screw entities and conveniently add new models and analyses.
A wide range of known mechanisms, hybrid architectures
and algorithms are presented. Furthermore, the modular
design protocol of STORM enables the user to add new
models and algorithms without reinventing the wheel. The
presented case studies elucidate the utility and flexibility in
computing reciprocal screws and assists in kinematic analysis
on different topologies of robots. The developed code will
be supported for Python 3.5 and MATLAB.
Presentation: https://www.youtube.com/watch?v=5O2F0NGuLjU&t=698s&ab_channel=PMARrobotics
Redundant Unilaterally Actuated Kinematic Chains: Modeling and Analysis
Dec 15, 2019: At PMAR Robotics, Genova, Italy
Team: Vishal Ramadoss
Supervisors: Dimiter Zlatanov MatteoZoppi
Unilaterally Actuated Robots (UAR)s are a class of robots defined by an actuation that is constrained to a single sign. Cable robots, grasping, fixturing and tensegrity systems are certain applications of UARs. In recent years, there has been increasing interest in robotic and other mechanical systems actuated or constrained by cables. In such systems, an individual constraint is applied to a body of the mechanism in the form of a pure force which can change its magnitude but cannot reverse its direction. This uni-directional actuation complicates the design of cable-driven robots and can result in limited performance. Cable-driven serial kinematic chain (CDSKC) are mechanisms where the rigid links form a serial kinematic chain and the cables are arranged in a parallel configuration. Through this thesis, the fundamental tools required in studying cable-driven serial kinematic chains have been presented. The results of this work highlight the potential of using CDSKCs in bio-inspired systems and tensegrity robots.
https://iris.unige.it/handle/11567/1005814#.X2Dd6GgzZPY
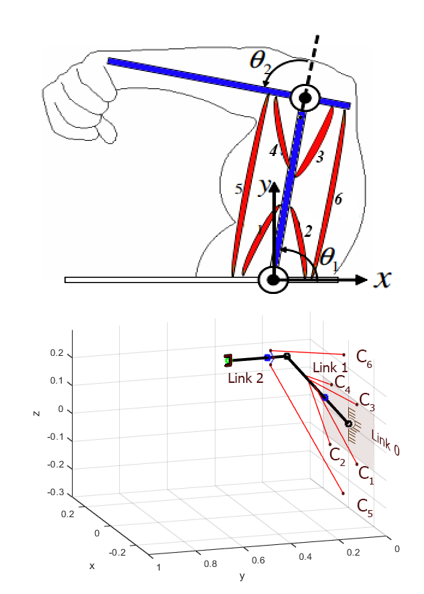
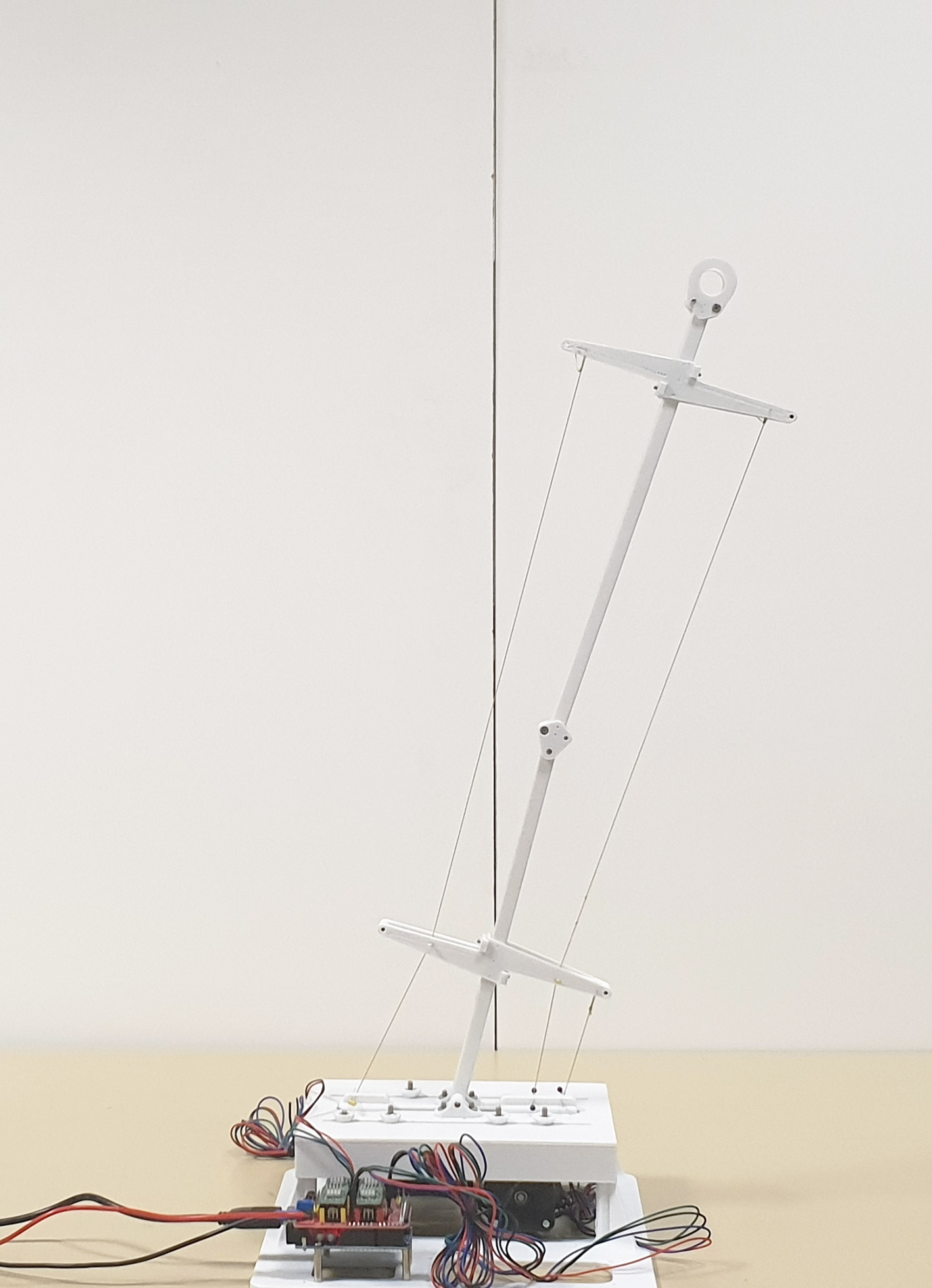
StringHaptics: Design of Serial Link Parallel Wire Robot for Virtual Reality Rehabilitation
June 1, 2019: At PMAR Robotics, Genova, Italy
Team: Vishal Ramadoss Keerthi Sagar Mohamed Sadiq Ikbal Michal Jilich
Supervisors: Dimiter Zlatanov MatteoZoppi
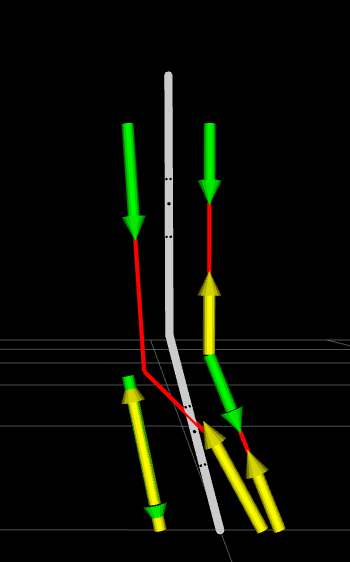
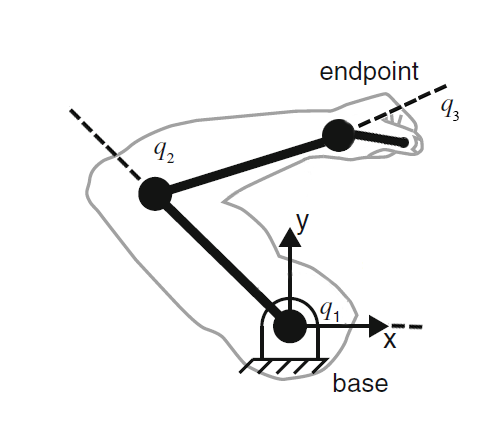
Wearable robotics is a rapidly evolving field with assistive exoskeletons being developed for medical and industrial purposes. These exoskeletons can be used for gait rehabilitation of patients, arm rehabilitation and provide body support during training. These exoskeletal systems are anthropomorphically structured mechanisms where the rigid links form a serial kinematic chain and the cables are attached in a parallel configuration. Cable-driven system eliminates the need of rigid links and mechanical joints, making the system lightweight. Due to the serial unilateral constraints, it has to be ensured that all cables remain in tension at any point of time for system functionality. This results in redundancy in the actuation system. The aim of this paper is to provide the design and analysis of these multilink cable-driven robots (MCDRs). From the information of workspace, we can check whether the cable driven exoskeleton is able to perform the desired behavior (gait motion) with positive cable tensions and without violating defined constraints.
Deploy 3D: Deployable Mechanism
June 1, 2015: At PMAR Robotics, Genova, Italy
Team: Vishal Ramadoss Shengnan Lu
Supervisors: Xilin Ding Dimiter Zlatanov MatteoZoppi
– Designed a family of deployable and foldable articulated mechanisms that have the ability to alter their shape to meet practical requirements for applications in aerospace industry and civil engineering
– Successfully presented a scientific report on feasibility of controlling different geometric surfaces using proposed mechanisms
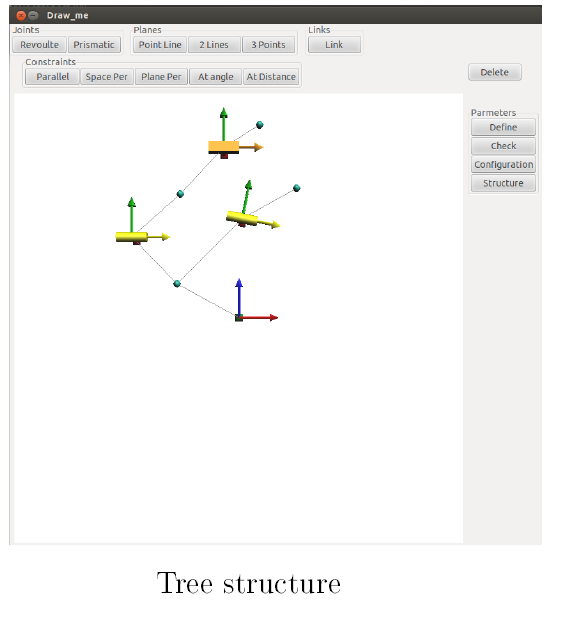
Draw Me: OpenSymoro Visualization Interface
June 1, 2014: At Institut de Recherche en Communications et Cybernétique de Nantes
Team: Małgorzata Kameduła Vishal Ramadoss
Supervisors: Wisama Khalil, Francois Rongere
– Team project with Małgorzata Kameduła from EMARO Master’s studies
– Designed and implemented an interactive user interface for Symbolic Modelling of Robots (SYMORO) platform using Python and OpenGL software for robotic system visualization
– Acquired experience in common software architecture frameworks and services and developed an open source program for SYMORO in GitHub repository
Research Station Projects

Weather Station
Oct 1, 2012: The Weather Station is a datalogging and monitoring device that can be easily reconfigured and adapted to a wide variety of applications. Up to 15 channels of data can be recorder and monitored remotely .We can set alarms to trip for specific sensor readings that you select or for overall system conditions,such as when the memory or battery is running low.The system consists of wind speed sensor, PAR Sensor, Solar Radiation Shield,Tipping bucket rain gauge and temperature and humidity sensor.This will allow us to have the complete meteorological data . The data will provide full complete data enabling researchers to correlate with their work.

Water wheel
May 15, 2012: Agumbe Rainforest Research Station is the only established rainforest research station in India which is located in Shimoga District in the state Karnataka,India.Agumbe forests are well known for King Cobra . Being a part of Malnad and Western Ghats, Agumbe and its surroundings are rich in biodiversity. At ARRS, study and conservation of rainforests through applied ecological research is conducted. The goal was to make the research station use sustainable power . My goal was to design a complete solution to solve the power crisis to enable researchers work on collected data . The mean annual rainfall is about 7640 mm which gave me an insight to design a mini-hydel generator for powering the station . March-July is summer season and the rains are minimal ,so we deployed Solar panels in turn charging the battery and power taken from the inverter. The hydro project was challenging and helped me to learn how a real deployment should be made.The design and fabrication was made keeping in mind the recyclye,reuse principle. So cycle rims were used as base which proved to be cost effective and simple . 90mm pipes were laid from stream via the checkdam directing to the wheel.Coming from Electrical background, I designed a Brushless DC generator from scratch rated for 1KW. The whole project was interesting and was appreciated as we reused majority of the materials.
Animation

Design, Character Modeling, Rigging, Animation
Sep 19, 2012: Studied foundations of design and 2d animation using Flash, 3d animation using Autodesk Maya at Arena Animation. Freelanced projects in illustrations, cartoon drawing, sketching, poster design, and 2d/3d animation. Participated in the Indian currency symbol design contest and mascot design contest.
Design Projects
Dvaitha: Social Robot
Sep 19, 2012 : Dvaitha, is an animatronic puppet you can easily control . Kismet and Leonardo gave the motivation to work with this low cost model that could be used by anyone from kids to teachers to play around with . The aim was to demonstrate the possibilities of interacting with human being. It uses an Arduino brain as a controller and acts in teaching , entertaining and emotional modes. Having incorporated a set of 6 servos , loudspeaker , LCD display , 2 sharp IR sensors to detect movements , 1 microphone , speech recognition module and speech module , this makes a perfect toy and a tutor for autistic children as well. In Chennai , there are lot of autistic children who are treated with several techniques , from ayurveda to yoga . And striking feature in all forms of treatment was the PLAY THERAPY , where the children interacts with toys , colors and real world objects. So ,I am interested in developing social robots to play around and teach the children to interact and make them learn.
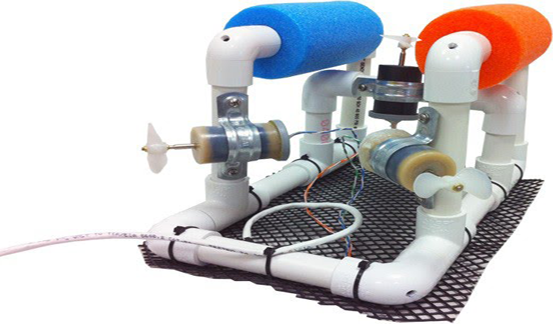
Design of Low Cost Underwater Rover
JAN 19, 2011 : Underwater rover was designed using PVC pipes and dc motors were waterproofed with candle wax and the rover was controlled using an Arduino microcontroller. The experiments were performed in Water tank, above home buildings and in a swimming pool.
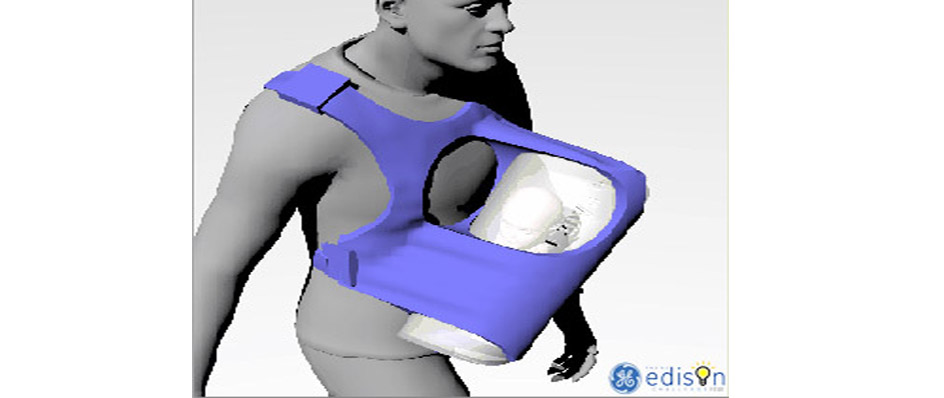
Design of Low Cost Incubator
JAN 19, 2011 : Nearly 4 million new borns die every day globally , most from easily preventable causes. We designed a low cost bag type incubator that incoporates simple air heating and breathing stimulator catering the rural India needs.Phase change material was deployed to maintain temperature and piezo actuator sheet to stimulate breathing which act as a respiratory sensor.
Sensing Glove
JAN 19, 2011 : Wearable Sensors and textile based prototypes add a different dimension to sensor electronics . Danfoss as a part of innovation challenge funded us the conductive elastomers which was deployed as strain sensors and integrated in usual garments.The flexible capacitive film was converted into a sensorized glove that was able to detect posture and movement of fingers.This could be used as a movement recorder for rehabilitation therapies
Rail Traffic Control Using Labview
JAN 19, 2011 : Indian Railways have more than 75,000 railway stations with 14,000 trains running . With increasing rail traffic in the present scenario control and management of rail lines are important . Till date mechanical lever near the tracks are used and we deployed a GSM Module for data transfer and Programmable controllers for Track change, processed in LABVIEW . NI India Student Design Contest Runner up
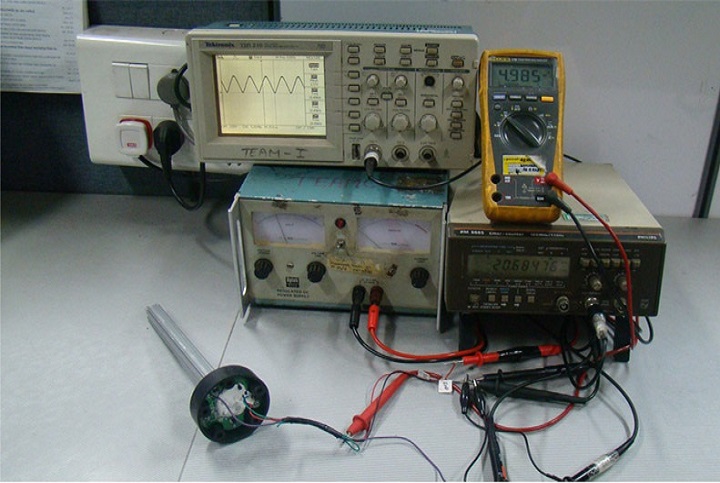
Capacitive Fuel Level Sensor Design
JAN 19, 2011 : Pricol Coimbatore,India are pioneer in manufacturing and exports of automotive instruments and precision engineering products .The product design division funded us to design a novel fuel level sensor that works on capacitive action.We designed a coaxial capacitive fuel sensor and studied the fuel level variations wrt changing capacitance.The capacitance fuel level sensor were designed , tested and deployed in John Dere tractors for preliminary deployment by our team.
Danfoss Polypower Innovation Challenge: Dielectric Elastomer based Sensor Design for Structural Health Monitoring
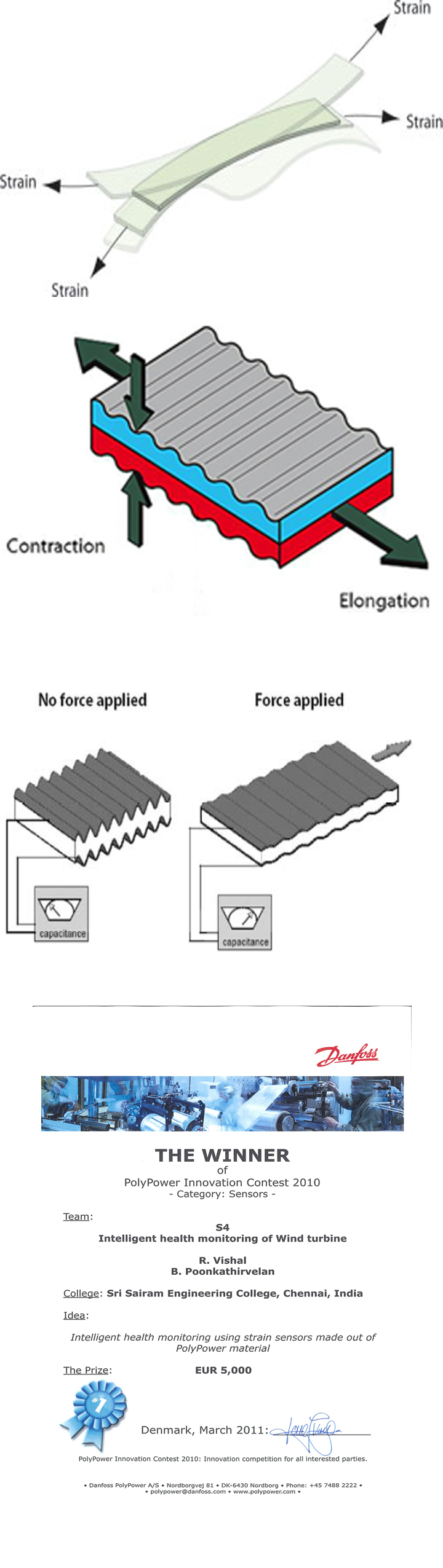
JAN 19, 2011 : Danfoss PolyPower A/S develops and manufactures a special optimized DEAP (Dielectric Electro Active Polymer) material. The PolyPower DEAP material is a silicone dielectric material with a special corrugated surface and very thin layer of metallic electrode on top of it. This patented design ensures significantly higher performance than other alternative design of DEAP materials.PolyPower DEAP material is a unique sensor material suitable for versatile elastic sensors
The PolyPower elastomer film is stiff in the direction along the corrugations due to the patended design in combination with high stiffness of metal electrodes. The PolyPower film only elongates in one direction, the compliant direction – as shown on the illustration. The basic principle is the same as for any other DEAP: When applying a voltage an electrostatic pressure will occur. The mechanical compression on the incompressible PolyPower film makes the film contract in thickness and elongate in length. Due to this unidirectional deformation, the elongation in the compliant direction of the PolyPower DEAP film is significantly higher than in alternative designs where the material elongates in two directions.
The PolyPower DEAP material is a silicone dielectric material with a special corrugated surface and very thin layer of metallic electrode on top of it.The PolyPower DEAP material is a unique sensor material suitable for versatile elastic sensors. The material is a flexible base for configuring new types of sensors that measure large strain and/or conform to complex shapes and structures. The fundamental principle is that the DEAP material acts as an elastic, capacitive strain sensor. The strain capability of the material is up to 100%. When mechanically strained, the change in capacitance of the element is proportional to the strain and load. The basic design of a sensor consists of a section of PolyPower DEAP material with electrical connections.
Stretching the DEAP material will change area and thickness resulting in a change in capacitance which can be measuredOur project involved designing sensors from the given raw material and deploy it in wind turbine to monitor the strains. Windpower , Pollachi was leading industrialist in India for maintenance of different wind turbine manufacturers. The main difficulty was that sensors placed in wind turbines are at extreme environmental factors . So we designed a black box concept inside which the sensor will be mounted and linear array of black boxes will be deployed on the axial frame of wind blade so that the strains are measured and wind turbine maintenance become easy .
AWARDED FIRST PLACE AMONG 10 FINALISTS ALL OVER THE WORLD. Our deployment idea of sensor was highly appreciated for its simplicity and easy application in all wind turbines.
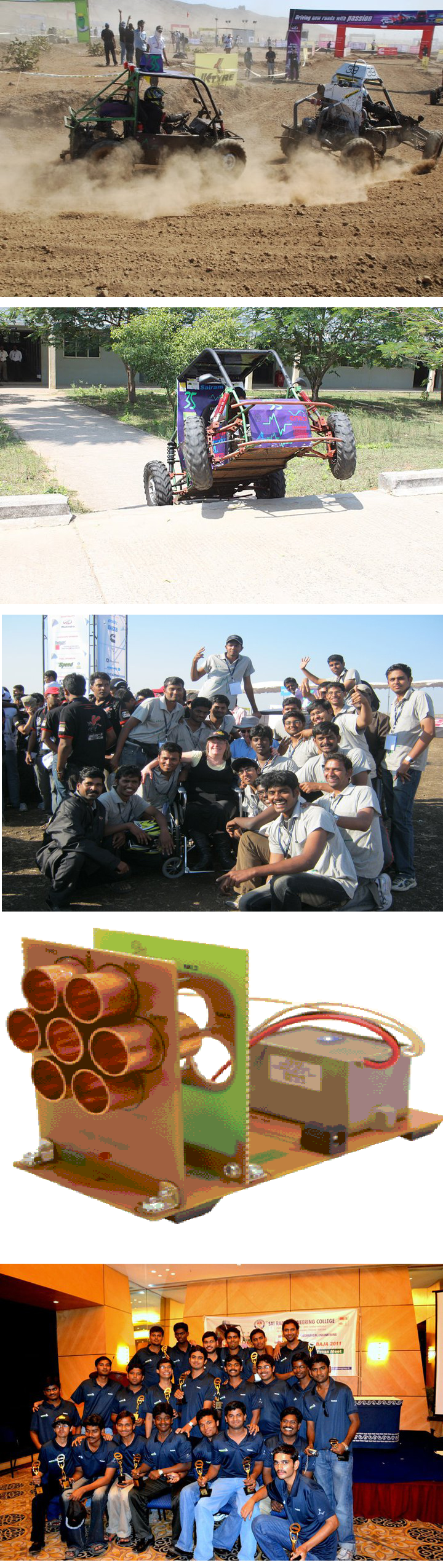
SAE BAJA: All Terrain Vehicle Design
JAN 19, 2011 : SAE Baja is among the most prestigious Students Competition in country in the Automotive field Where it gives the students a real world experience of Project Management, Design, Theory, Manufacturing, Costing, Vehicle Testing.
The team “THE MOST WANTED ” from Sri Sai Ram Engineering College bagged the 1st position in South India and secured an overall position of 4th in India. Apart from this the team also cleared the technical inspection in the first attempt (the only team to do so among the 80 teams). As a result of the student’s effort ,hard work and more importantly team effort made us win the “CHAIRMAN’S AWARD” with a cash award of Rs 10,000 for team effort , effective leadership , good coordination and teamspirit. The BAJA SAE INDIA student challenge is a feted student competition iamet lortin exercing esenim vullathat presents the undergraduate engineering students with a stimulating task of designing,fabricating and validating all All Terrain Vehicle(ATV).The history of the event dates back to the mid 70’s when it was organized in USA and since then it is being conducted annually at several locations across the globe, including USA, MEXICO, CANADA, SOUTH AFRICA, BRAZIL, and KOREA, witnessing participation from most prominent technical schools around the world. The event was organized in India from the year 2007 as BAJA SAEINDIA at NATRAX (National Test Tracks) facility of NATRIP (National Automotive Testing R&D Infrastructure Project) situated at Pithampur in Madhya Pradesh.
The BAJA SAE ASIA 2011, hosted by SAEINDIA in aegis with NATRIP and ARAI, tasks the students to design and build an off road vehicle that would sustain the punishments of the rough terrain. The project educates students by giving them a pragmatic exposure to the real world challenges as faced in the industry; thus serving the prime objective of bringing out the talent to serve the nation for the years to come, in continuation with the vision Automotive Mission Plans(AMP 2016), a dream to make India an international Automotive hub. The BAJA SAEINDIA series has witnessed a close partaking from industry in the form of sponsorship for the teams. The platform is highly recognized as a venture to grab the country’s finest engineers with the right passion to be absorbed directly into the industry. The out-of classroom engineering learning through hands on experience has brought a chasm transformation into the quality of students entering the industry.
We the team “The Most Wanted” representing Sri Sai Ram Engineering College for SAE BAJA 2011 comprises of 23 members( 21 from Mechanical and 2 from Electrical and Electronics department) led by the Captain Felix Udhayaraj.R. The design was widely appreciated at the Virtual BAJA 2011 at New Delhi and we got selected for the next round. The team itself has been further divided into groups, with each group in-charge of various functions. S.Niranjan, design head, with K.V.Vidyashankar, S.Vinod, Vinod Kumar and T. Mouli Ganesh were charged with designing a robust roll-cage that could withstand rugged terrain.
The Marketing department headed by R.Karthik along with Arvind.S.Kashyap, Arubind.S, Vignesh and Mohan Murali were instrumental in obtaining sponsors to support the costs of fabrication. Without the efforts of these students and the college management fabricating the vehicle would have never been a reality. Fabrication was undertaken by S. Rakesh assisted by S.Vignesh (Vice Captain), G.Satish Kumar, S.Mohan and Gurushankar. All these individuals put in arduous efforts working day and night to ensure that the best possible ATV was made that shall compete wit the best. And we are proud to say that the outcome had been really fantabulous .
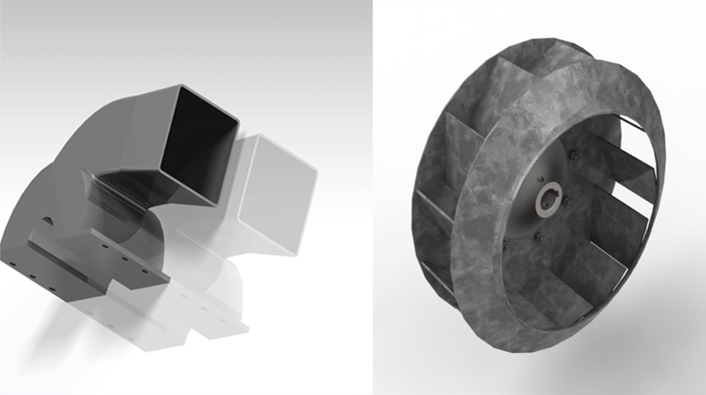
The final inspection of the ATV was done by N.Balaganesh, L.Vignesh, S.Karthik and R.Murugesan. They ensured that the fabrication was in terms with the design and any glitches were rectified to avert any danger. The Innovation and Go Green concepts were handled by me and S.Poonkathirvelan from the Electrical and Electronics Department. They designed a negative ion generator for Innovation Theme and Energy Harvesting from Vibration of ATV using Polymeric material for Go Green Theme . The Energy Harvesting concept was highly appreciated from Society of Automotive Engineers. More Information Click here P. Deepak was our driver who is a audacious, fierce competitor capable of making the vehicle dance to his tunes .FASTEST LAP RECORDED IN ENDURANCE RACE:Our ATV won the ‘Safe vehicle award’ among 198 ATV’s designed from various colleges from India.Also it bagged the Chairman’s award from SAE INDIA.
General Electric(GE) Industry Defined Problem
Oil Spill Containment
Oct 1, 2010: Our team was given the opportunity to put together a plan to treat the oil spillage similar to what happened near Mumbai and Gulf of Mexico . It was on the spot contest for designing solutions for such worst-case scenarios .We were asked to implement mechanisms to monitor the extent of oil spillage and identify critical areas that requires faster response and controlled . We designed a quad blower mechanism using four miniature fans and showed that due to different specific gravities and blowing force from equidistant points the oil gets concentrated and arrays of quad rotor blowers will make the containment faster . Then the conventional skimmers can be deployed to skim the oil out of water . Our idea was highly appreciated and awarded for practicality and real time application .
Summer Research Fellowship at IIT Madras, India
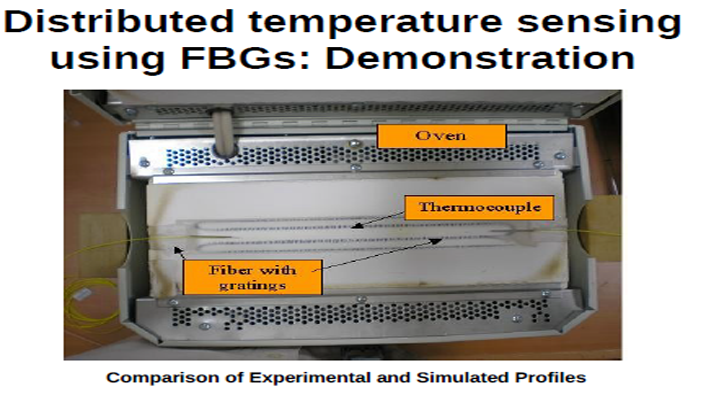
Distributed High Temperature Sensing Using Fiber Bragg Grating
May 15, 2008: During the same year , I was awarded a student research fellowship funded by Goverment of India and Indian Institute of Technology , Madras to work under the guiding light of Dr.Balaji Srinivasan who encouraged me to pursue research as a passion and assisted me in designing a high temperature sensor using Fiber bragg grating (Optical Fiber). This was an eye opener into the field of Photonics , i worked with Lasers and designed sensor by myself by creating grating in the optical fibers by passing high energy laser beams . The temperature changes were encoded in wavelength. I worked on a software called Mograso in Linux for calculating modes of long period gratings and was able to simulate sensing action capability by these long period gratings.
Design Projects
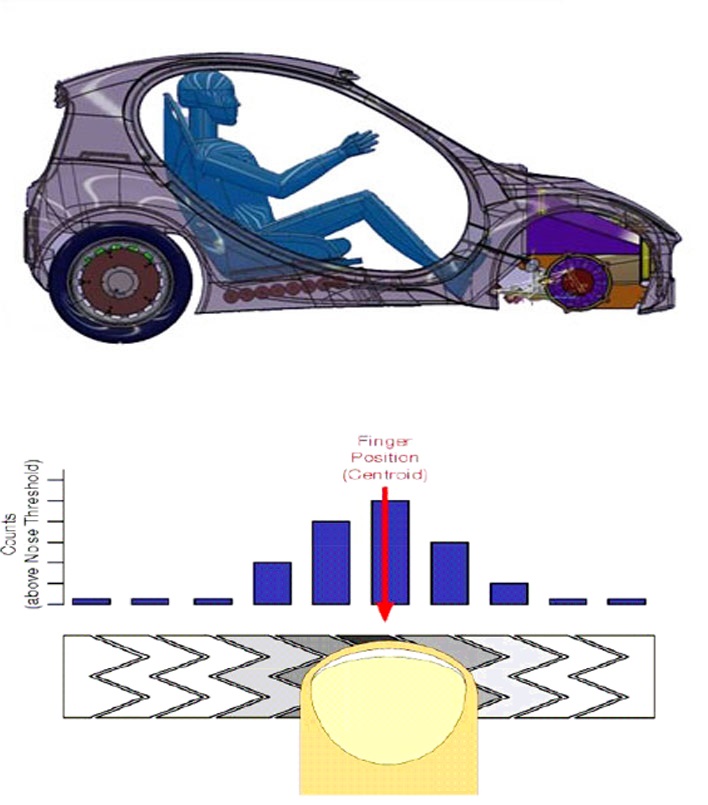
Capsteer
May 15, 2008: There has been minimum number of technologies related to developing universal drive system for wheelchair as well as mundane users . A joystick type car drive interface for wheel chair users has been developed which allows a person to drive a car with a small force and operative motion in quite limited stroke and a system for transferring the person to the driver’s position.We worked on a new system that can be used as a feather touch interface embedded in steering which also takes into account the acceleration and braking , clutch being placed in the gear knob as proximity sensor .
Our system basically consisted of capacitive sensing sliders embedded on steering frame which acts as an acceleration module . The slider is an array of capacitive sensing buttons which is used to sense the sliding movement of finger and transmits signal to the controller The buttons send the signal depending upon the intensity of touch to the controller therby actuating the master cylinder through electronically controlled vacuum actuators. The clutch pedal is totally replaced by capsense based proximity sensor which is embedded on top of gear knob . This enables the user to hold the clutch during gearshifts.This has an edge over conventional method as clutch is always engaged during gearshift. Our work was published in IEEE and DBPIA Korean Journal .
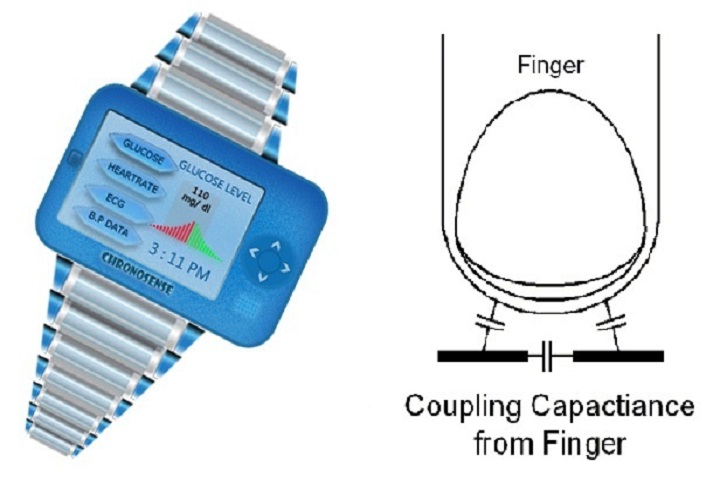
Chronosense
May 15, 2007: At the heart of any capacitive-sensing system is a set of conductors which interact with electric fields. The tissue of the human body is filled with conductive electrolytes covered by a layer of skin, a lossy dielectric. It is the conductive property of fingers that makes capacitive touch sensing possible. This made me think in a whole new direction with ideas ranging from touch sliders for dimming lights to touch based steering,acceleration and braking control in vehicles . I was very much interested in correlating the blood’s electrical and dielectric properties that finally evolved into a product Chronosense which was a Non invasive Health monitoring system that deploys the bioimpedance technique.
Here the beating heart was considered as a variable capacitance , capacitance becomes larger on heart diastole and smaller on systole. Because of periodicity of heart beat , according to the electrical theory,integral of capacitance in one period can dissolve heart disturbance . Apnea , Heart disturbance can be filtered . Our focus was the measurement of blood impedance for the purpose of extracting physiological data such as blood flow , cardiac activity , electrical and dielectric changes in blood relating to concentration of different substances in blood. I shared this concept with Mark Lee and Dave Van Ess , Senior Application Engineer ,San Jose ,CA, Cypress Semi conductor and Designer of CapSense Technology who was surprised to see such a product evolving from their technology and gave us technical support and menotred the whole project as it would benefit millions of people . Our work was published in IEEE and DBPIA Korean Journal .